Robótica
Asombrosa versión robótica de un insecto palo
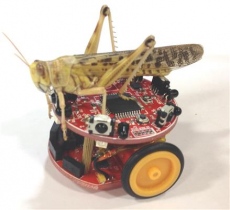
Un equipo de investigación ha conseguido enseñar a caminar al único robot de su tipo en el mundo. Se llama Hector y su construcción se ha basado en el insecto palo. Hector dispone de articulaciones elásticas pasivas y de un exoesqueleto ultraligero. Lo que lo hace único es que también está equipado con un gran número de sensores y que funciona según un concepto de control reactivo descentralizado, inspirado en un sistema biológico. Hacia 2017, el robot andante será dotado con capacidades adicionales.
El robot ha sido construido por el equipo de Axel Schneider, Volker Dürr y Jan Paskarbeit, de la Universidad de Bielefeld en Alemania. En el futuro, Hector debería servir como plataforma en la que biólogos y robotistas pongan a prueba hipótesis sobre la locomoción animal. Un aspecto fundamental será la combinación de grandes cantidades de datos procedentes de los sensores para que el robot pueda andar de forma más autónoma que antes.
Hector puede adaptarse de manera flexible a las propiedades de las superficies en las que esté caminando.
![[Img #24258]](upload/img/periodico/img_24258.jpg)
El reto fue desarrollar un sistema de control que coordinara los movimientos de sus patas en entornos complicados. Todos los subsistemas tienen que comunicarse entre sí para que el robot camine sin dificultades. De otro modo, por ejemplo, Hector podría tener demasiadas patas en el aire al mismo tiempo, volverse demasiado inestable en ese momento, y caerse. Además, las patas tienen que poder reaccionar ante las colisiones con los obstáculos.
Tanto los sistemas táctiles como los visuales del robot se han inspirado en los de los insectos; sus espacios de trabajo y sus resoluciones son parecidos a las de los modelos animales empleados como fuente de inspiración.