Robótica
Los microrrobots propulsados por bacterias ya tienen sistema de guiado
Una espectacular innovación, la de microrrobots que, por así decirlo, se desplazan a lomos de bacterias, entra ahora en una nueva y prometedora fase. De ser una mera curiosidad tecnológica podría pronto pasar a ser una herramienta con utilidad práctica.
El problema de tener un robot microscópico propulsado por una horda de bacterias que se arrastran mediante movimientos de sus colas (flagelos) es que nunca se sabe dónde va a ir a parar. Los diminutos biorrobots, que vienen a ser un chip revestido con una “alfombra” de bacterias flageladas, surgieron de los primeros resultados de las investigaciones en microrrobótica realizadas hace unos años como un concepto para construir dispositivos microscópicos y suministrar medicamentos a nivel celular. Pero como con cualquier robot, el reto a la hora de hacerlos útiles es estrechar la brecha entre movimiento y automatización. Un equipo de ingenieros de la Universidad Drexel en Estados Unidos parece haber superado esos obstáculos técnicos, recurriendo para ello a una estrategia basada en el uso de campos eléctricos para dirigir a los robots en un entorno fluido.
Siguiendo la línea de investigación y desarrollo iniciada algún tiempo atrás con las bacterias flageladas Serratia marcescens y con un campo eléctrico para dotar de movilidad a un microrrobot, el equipo de MinJun Kim está ahora ofreciendo un método para hacerlos más ágiles.
La clave para lograr una buena capacidad de locomoción y guiado para los diminutos robots híbridos es la bacteria S. marcescens. Estos nadadores con forma de bastón, culpables conocidos de infecciones respiratorias y del conducto urinario en los hospitales, poseen de forma natural una carga eléctrica negativa, lo que significa que pueden ser manipulados a través de un campo eléctrico como si fueran píxeles en un TeleSketch.
Cuando se agrega una colonia de bacterias a un sustrato, en este caso un chip cuadrado de material fotosensible llamado SU-8, se logra un microrrobot cargado negativamente que puede moverse por un fluido siguiendo las ondas de un campo eléctrico. El flagelo, parecido a un látigo, de las bacterias ayuda a mantener al robot suspendido en el entorno fluido, proporcionando al mismo tiempo una pequeña cantidad de propulsión hacia adelante. El impulso principal procede de dos campos eléctricos perpendiculares que convierten el fluido en una rejilla electrificada. Dado que las bacterias están cargadas negativamente, el equipo puede manipular a los robots ajustando simplemente la intensidad de la corriente.
![[Img #34643]](upload/img/periodico/img_34643.jpg)
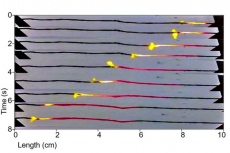
Los investigadores de la Universidad Drexel han desarrollado una forma de usar campos eléctricos para controlar microrrobots en un fluido y permitirles de manera automática detectar obstáculos, esquivarlos, y reanudar su trayectoria hacia su punto de destino. (Imagen: Drexel University)
Es posible dirigir manualmente a los robots o darles unas coordenadas para llevarlos desde el punto A al punto B, pero la meta más interesante ha sido permitir a los microrrobots navegar por una ruta con obstáculos aleatorios bloqueando su camino. Esto precisa un nivel de automatización que no se había alcanzado previamente en la investigación de microrrobótica híbrida.
El grupo de Kim alcanzó este objetivo produciendo un algoritmo de control que permite a los diminutos robots usar de forma efectiva la forma del campo eléctrico sobre el que se mueven como un modo de detectar y evitar obstáculos, como hace un surfista al observar dónde rompen las olas para apartarse de peligros sumergidos.
Cuando el robot nota un cambio en el patrón del campo, el algoritmo ajusta automáticamente la trayectoria para eludir el obstáculo. De esta forma, los robots están usando campos eléctricos como un medio de transporte y para maniobrar.
Además de la información del campo eléctrico, el algoritmo utiliza asimismo un sistema de seguimiento de imágenes procedentes de una cámara montada en un microscopio para localizar el punto de partida del robot y su destino final.
El próximo paso para el laboratorio de Kim es desarrollar un sistema que consista en varios microrrobots energizados por bacterias que puedan llevar a cabo la manipulación de múltiples células vivas in vitro. Tal sistema podría tener varias aplicaciones importantes, incluyendo la manipulación de células madre.