Robótica protésica
Mano protésica robótica neumática, más eficiencia a menor costo
Para los más de 5 millones de personas en el mundo que han sufrido una amputación de miembro superior, las prótesis son una ayuda cada vez mejor. Desde las prótesis inertes tradicionales, como de maniquí, hasta las de hoy en día que son capaces de moverse a partir de señales mentales del usuario, se ha hecho un largo recorrido.
Las actuales neuroprótesis comerciales son miembros biónicos altamente articulados, diseñados para detectar las señales musculares residuales del usuario e imitar robóticamente los movimientos que el miembro real ejecutaría. Pero esta destreza de alta tecnología tiene un precio. Estas neuroprótesis modernas convencionales pueden costar decenas de miles de dólares y están construidas en torno a esqueletos metálicos, con motores eléctricos que pueden ser pesados y rígidos.
Ahora, unos ingenieros del Instituto Tecnológico de Massachusetts (MIT), en Cambridge, Estados Unidos, y de la Universidad Jiao Tong de Shanghái en China, han diseñado una mano neuroprotésica blanda y ligera. Las personas con amputación que probaron el miembro artificial realizaron actividades cotidianas, como cerrar la cremallera de una maleta, servirse zumo de un tetrabrik en un vaso y acariciar un gato, tan bien (y en algunos casos mejor) que quienes tenían neuroprótesis más rígidas.
El equipo de Xuanhe Zhao (MIT) también constató que la prótesis, diseñada con un sistema que dota al usuario de cierta sensibilidad táctil, restablecía algunas sensaciones primarias en el muñón de un voluntario. El nuevo modelo de mano robótica es además sorprendentemente duradero y resistente a percances, recuperándose rápidamente tras ser golpeado con un martillo o atropellado con un coche.
La mano pesa alrededor de un cuarto de kilogramo. Sus componentes cuestan unos 500 dólares. El peso y el coste son una pequeña fracción de los que tienen los materiales empleados en prótesis de extremidad superior más rígidas.
![[Img #64579]](https://noticiasdelaciencia.com/upload/images/08_2021/5037_mano-protesica-robotica-neumatica.jpg)
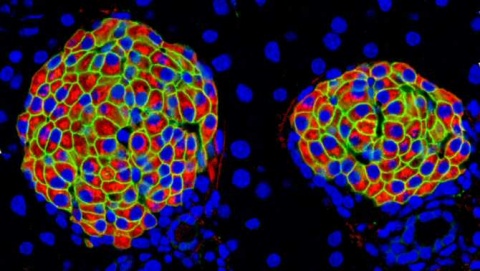
La mano protésica neumática en acción. (Foto: cortesía de los investigadores. CC BY-NC-ND 3.0)
La nueva mano protésica está hecha en buena parte de un material blando y elástico, concretamente el elastómero comercial EcoFlex. La prótesis consta de cinco dedos en forma de globos alargados, cada uno de ellos con segmentos de fibra, lo que hace asemejar los dedos a los huesos articulados de los dedos reales. Los dedos protésicos son muy flexibles y están conectados a una "palma" impresa en 3D, con forma de mano humana.
En vez de controlar cada dedo mediante motores eléctricos montados, como hacen la mayoría de las neuroprótesis, los investigadores utilizaron un sencillo sistema neumático para inflar y desinflar con precisión los dedos y de este modo doblarlos o enderezarlos en posiciones específicas. Este sistema, que incluye una pequeña bomba y válvulas, puede llevarse en la cintura, lo que reduce considerablemente el peso de la prótesis y contribuye a lograr movimientos más intuitivos y naturales.
Shaoting Lin del MIT desarrolló un modelo informático para relacionar la posición deseada de un dedo con la presión correspondiente que tendría que aplicar una bomba para lograr esa posición. A partir de este modelo, el equipo desarrolló un controlador que dirige el sistema neumático para regular el aire del interior de los dedos a fin de que estos adopten posiciones que imitan cinco formas comunes de agarrar cosas, como por ejemplo la del pulgar conformando una pinza con el índice para coger objetos muy pequeños, o la de ahuecar la parte inferior de la mano vuelta hacia arriba para que la palma y los dedos sirvan de cuenco en el que depositar un puñado de tierra o muchos objetos diminutos.
El sistema neumático recibe señales de sensores de electromiografía que miden las señales eléctricas generadas por las neuronas motoras para controlar los músculos. Los sensores se colocan en la abertura de la prótesis, donde esta se acopla a la parte natural de la extremidad del usuario. De este modo, los sensores pueden captar las señales del muñón, como las emitidas cuando una persona se imagina cerrando el puño en la mano de carne y hueso que ya no posee.
El equipo recurrió entonces a un algoritmo existente que "descodifica" las señales musculares y las relaciona con los tipos de agarre habituales. El equipo empleó este algoritmo para programar el controlador de su sistema neumático. Cuando una persona con amputación de miembro superior se imagina, por ejemplo, sujetando una copa de vino, los sensores recogen las señales musculares residuales, que el controlador traduce en las presiones correspondientes. La bomba aplica entonces esas presiones para inflar cada dedo del modo que permite producir el agarre deseado por la persona con amputación. (Fuente: NCYT de Amazings)